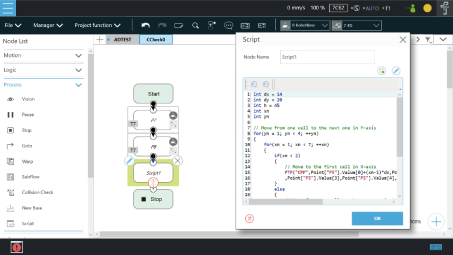
TMflow™ は、 一連の関数ノードを使用したグラフィカルインターフェイスを介してロボットタスクを作成および編集できるユーザーフレンドリーなソフトウェアであり、 ロボット工学の経験がない初めてのユーザーでも簡単にフローベースのプログラミングを学ぶことができます。
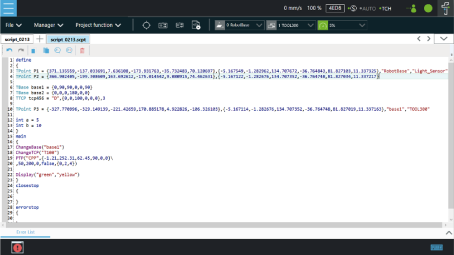
グラフィカルでないプログラミングを希望される場合は、 新しいスクリプトノードとスクリプトプロジェクトを使用して、 より柔軟な方法でプログラミングを行うことができます。経験豊富な技術者は、 スクリプト機能を使用して、 複雑なロジックでプログラミングしたり、 コードをコンパイルしてロボットタスクを自由に編集したりできます。 自分に合った方法を取り入れ、 他に類を見ない自由はコーディングをお楽しみください!